

Еліптичний привод Velox-2
Ті, хто стежили за світовим чемпіонатом по швидкісному спринту на 200м сходу, читаючи російські форуми (я стежив саме там майже завжди) могли бути введені в оману, думаючи, що світовий рекорд встановили саме на еліптичному приводі.
Команда голландських студентів, що розробили стрімлайнери Velox (1-4), дійсно проводили тести альтернативної системи приводу, і навіть брали учсть з нею у змаганнях. Проте, рекорд вони встановили на класичному «круглому» приводі, що підтверджують записи на їх офіційному сайті (посилання на оригінал сторінки буде нижче).
Ось що вони пишуть про свої машини:
Velox-1:

Velox 1
Побудований за 2010-2011 роки
Особливості:
1 – Висока жорсткість конструкції завдяки карбоновій об’ємній рамі.
2 – Тонкий карбоновий обтікач, що розділяється на дві половини по вертикалі.
3 – Цепний привод з проміжною передачею.
4 – Переднє колесо 28, заднє – 26дюймів.
5 – Повітрязабірник по системі NACA.
Кращі результати:
Спринт: 129.61 км\год. Годинний заїзд: середня швидкість – 88.4 км\год
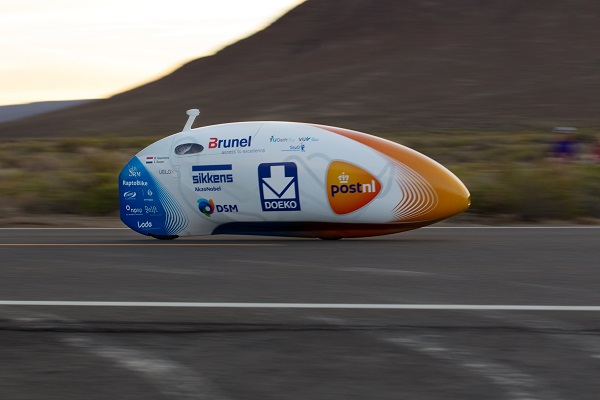
Velox-2:

Velox 2
Еліптичний привод Velox-2
Побудований за 2011-2012 роки
Особливості:
1 – Еліптичний привод
2 – Оглядова камера замість лобового скла
3 – Повітрязабірник по системі NACA
4 – Карбоновий несучий корпус-монокок.
5 – Збільшений верхній люк.
Кращі результати:
Спринт: 128.94 км\год

Прототип альтернативного приводу
Velox-3:
VeloX3

VeloX3 і команда
Побудований за 2012-2013 роки
Особливості:
1 – Шини з ультра низьким опором кочення (прототип від Мішлен 16 дюймів).
2 – Повернення до круглого цепного приводу.
3 – Привод на заднє колесо.
4 – Планетарна система передач (на 2-й сходинці підвищення співвідношення).
5 – Короткий верхній люк
Кращі результати:
Спринт: 133.78 км\год – світовий рекорд (встановлено у 2013-му році).
Velox-4

Velox 4
Побудований за 2013-2014 роки
Особливості:
- Покращена аеродинаміка
- Горизонтальне розділення обтікача.
- Інтегрована вентиляція сидіння.
- Рама з труб.
- Вперше їздили жінки.
Кращі результати:
Спринт: 132.26 км\год (чоловіки), 110.75 км\год (жінки).
Годинний заїзд: середня швидкість – 78.6 км\год
Оригінал дивіться тут: http://www.hptdelft.nl/en/geschiedenis.php
За посилання на матеріали для статті дуже дякую одному з модераторів форуму «Харків Турист» Андрію Рибальченко.
Щоб ніхто нічого ні з чим не сплутав: Олексій Ганшин під терміном “еліптичний привод” мав на увазі оце:
http://www.hptdelft.nl/images/usedimages/drivetrain.png
http://www.bentrideronline.com/messageboard/showthread.php?t=85614
Траєкторія педалей – витягнутий по горизонталі овал.
Саме цю штуку встановили на Velox-2. Основні мотиви:
1) зменшити мідель обтічника, себто вдосконалити аеродинаміку;
2) підняти потужність.
Першого досягли, другого – ні. Потужність, навпаки, впала. Velox-2 показав навіть гірший результат, ніж Velox-1.
Знайшов ще трошки даних про конструкцію з еліптичним рухом педалей та про історію ідеї.
http://www.deferredprocrastination.co.uk/blog/2012/kingsbury-k-drive
Там намальована й траєкторія. Овал вельми вузький та витягнутий. Можна сказати, що це наближення до лінійного приводу (про який ми, сподіваюсь, ще побалакаєм).
http://www.deferredprocrastination.co.uk/blog/wp-content/uploads/2012/04/k-drive-3-300×212.png
http://tilting.org.za/bok/kdrive.html
http://tilting.org.za/bok/kstory.html
Андрію, дякую за доповнення. Навряд чи я зможу написати статтю про лінійний привод найближчим часом, бо для цього потрібно вивчити матеріали. Це хіба що ви самі оформите свої знахідки у статтю, а я допоможу її викласти.
Дякую, Олексію – дуже цікава стаття та достатньо корисна інформація, у тому числі корисна навіть у практичному плані. До чого я це кажу? А до того, що еліптичний привід, хоч і показав гіршу енергетичну ефективність від класичного “круглого”, але гірший він усього на 3,75 відсотка у порівнянні з рекордним апаратом. Таку величину можна ігнорувати у тих випадках, коли мова йде про побутовий веломобіль, а не про рекордний стрімлайнер.
Тому я вважаю, що схожий тип приводу можна буде використовувати навіть у саморобних HPV-конструкціях – у тих випадках, коли потрібно зменшити розміри переднього обтікача чи усього корпусу, або у якихось інших специфічних моделях HPV-техніки.
Звісно, еліптичний привід має більш складну конструкцію, аніж звичайна “класична передня система”. Але такий привід реально відтворити навіть у домашній майстерні, якщо у наявності є токарний станок.
Тому особисто я вважаю таку конструкцію еліптичного приводу придатною для використання у саморобних HPV-конструкціях, та беру її для себе “на замітку” 🙂
Там не так просто. Ви нарахували 3,75% різниці в потужності на користь звичайного приводу, поділивши результат Velox-3 на результат Velox-2. Між тим сила лобового опіру – квадратична функція швидкості (звісно, якщо швидкість дозвукова). Тому припустивши, що решта чинників однакові, отримаємо не 3,75%, а 7,6% (1,0375 х 1,0375).
Крім того, обтічник на третій моделі значно більший, бо ховає звичайні стандартні шатуни (й відповідний простір для ніг). Це видно з картинок.
Velox-2: http://www.hptdelft.nl/images/usedimages/velox2.png
Velox-3: http://www.hptdelft.nl/images/usedimages/velox3.jpg
Тому не гріх припустити, що лобовий опір у Velox-3 помітно більший, бо мідель в даній дисципліні – це альфа й омега. А значить, на ідентичних швидкостях третя модель потребувала більшої потужності, ніж друга. Через це різниця в потужності явно має бути значно серйозніша за нараховані мною 7,6%. На мою думку, там упевнено >10%.
Нарешті, все це коїлося на спринтерських режимах: залікові 200 метрів проїжджають трохи більш як за 5 секунд. Тому я б не поспішав думати, що у трохи звичайніших умовах альтернативний привод поведе себе приблизно так само, як у спринтерській гонці. Щось підказує, що його справи ще погіршаться. Чому так гадаю? Погляньте хоча б на частоту педаляжу (відео):
http://www.deferredprocrastination.co.uk/blog/2012/kingsbury-k-drive
Вже через хвилину в такому повільному силовому режимі м’язи к бісу закисляться. Нормальна частота у стайєрських гонках – >90 об/хв.
Натурально, можна й дещо заперечити з викладеного. Проте столітня практика каже, що лінійні приводи поки що давали лише програш. Тільки сучасних конструкцій з лінійним приводом (чи наближеннями до нього – хитними важелями, овальними траєкторіями педалей і т. д.) я нарахував десятки. Найближчий гоночний приклад – ліґерад Ґрема Обрі.
https://www.google.com.ua/search?q=graeme+obree&espv=2&biw=1024&bih=747&source=lnms&tbm=isch&sa=X&ei=OoW1VPe6JcaAUcyPgqgG&ved=0CAYQ_AUoAQ#tbm=isch&q=graeme+obree+recumbent
Як хто не зна, хто такий той дядько, – пошукайте самі (а дядько славнозвісний). Так от, натяк мораль – у тому, що розігнався він лише до ~100 км/год на тих самих 200 метрах.
В останньому реченні хотів сказати “натяк на мораль” і пропустив слово “на”.
До речі, спринтери зі звичайними кривошипами видають максимальну потужність за каденсу більше 120 об/хв. Часто значно більше.
https://www.youtube.com/watch?v=OtNP-iFhyuE&list=PLB6CB04ABF3CE53D5
Andr, звісно, я з Вами згоден у тому, що лінійні та близькі до лінійних приводи дещо програють класичному круглому приводу у енергетичній ефективності та мають більш складну (а тому важчу та менш надійну) конструкцію. Я лише звернув увагу на те, що у деяких специфічних конструкціях HPV-техніки можна використати схожий привід – там, де будуть корисними саме особливості такого приводу, а його трохи меншою енергетичною ефективністю можна знехтувати.
Сподіваюсь, Ви мене зрозуміли. Грубо-приблизно можна сказати так: “технічні рішення, прийнятні для боліда Формули-1, зовсім не годяться для колгоспного трактора, та й навпаки – теж не підходить”.
Який сенс витрачати стільки ж сил, а їхати повільніше? Мені спадає на думку тільки один варіант такого веломобіля – “Колібрі” Ульяновського (http://velomobile.org/library/articles-gl/110), який призначався, начебто, для переміщення у мегаполісі, а зберігатись мав у квартирі. Але тут не бачу сенсу взагалі говорити про веломобіль, адже звичайний велосипед, або лігерад був би і швидший і зручніший і компактніший. А те, що немає даху, так в мегаполісі навряд чи є потреба півдня перебувати під дощем в дорозі. В місті люди їздять на роботу\з роботи на невеликі відстані.
Не думаю, що варто свідомо втрачати ефективність, у всякому разі не бачу навіть уявного прикладу, де це могло б бути виправдано.
Находил такой вот педальный – овальный привод. https://www.youtube.com/watch?v=hdQwAEwVSRs
https://www.youtube.com/watch?v=EpiEX2Y7iAg http://www7a.biglobe.ne.jp/~otec/
Значит магии не существует? Что скажите? Японцы пишут что даже средний ездок поднимается в горку на таком аппарате где обычно предпочитают идти пешком. На обычных велосипедах переделать каретку это проблема, а на лигерадах часто она съемная.