
Зовсім недавно, під час роботи над трайком «Універсал» я помітив, що передні колеса прагнуть до само стабілізації, якщо правильно виставити кути продовжного і поперечного нахилів шворнів. Суть у експерименту в тому, що під час руху одне з коліс не було з’єднане з іншим рульовою трапецією, але, тим не менше, слідувало за напрямком руху трайку, повертало разом із рульовим колесом в поворотах. Ось на цьому відео видно аналіз геометрії (а саму кутів установки шкворнів), та робота само стабілізації.
Я тоді вирішив, що колеса , якщо дати їм волю, самі стають у найкраще положення (паралельно одне одному), і що достатньо помітити це положення, і потім зафіксувати його довжиною рульової трапеції. Так я хотів виключити необхідність заміряти рулеткою відстань між колісними дисками спереду і позаду осей, щоб налаштувати паралельність класичним способом.
Однак, на наступний день після першого дальнього виїзду на трайку Універсал, при гарному освітлення я придивися до передніх коліс і побачив помітній знос резини! При чому явно було видно, що цей знос спричинений надмірним сходженням коліс. При замірі паралельності класичним способом я виявив сходження близько 15 мм. Почав думати, чим це могло бути спричинено.
Все виявилось доволі просто:
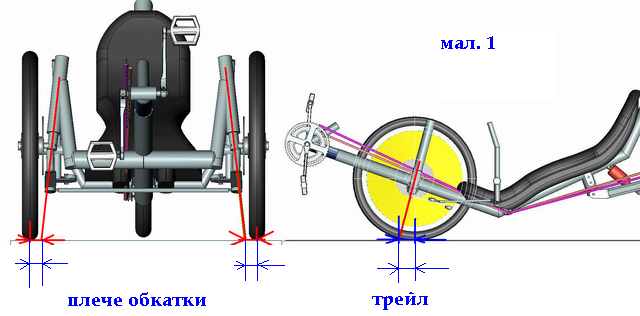
В стані спокою, за рахунок нахилу шковрнів, а також плечу обкатки (див. схему на малюнку 1) на колеса діє Сила Вагової Стабілізації (Fвс). Вона намагається повернути колеса всередину, тобто на сходження.
Під час руху, за рахунок трейлу з’являється Сила Стабілізації Руху (Fср), яка намагаэться поставити колеса параллельно напрямку руху (той самий ефект можна спотерігати на візку в супермаркеті). Але при цьому Сила Вагової стабілізації не зникає, отже колеса займають проміжне положення, при якому вектори сил компенсують один одного.
Це положення НЕ Є ПАРАЛЕЛЬНИМ НАПРЯМКУ РУХУ (див малюнок 2).

Тобто, для вірного налаштування паралельності коліс необхідно використовувати геометричний тест (замір відстані між передом і задом ободів, а також ходовий тест з пасками (який я планую провести на днях)).

Правило Аккермана

Теорія: виникнення стабілізації руху
Вітаю з довгоочікованним теоретичним підходом щодо вагової стабілізаціі передніх коліс. Але: плече обкатки має бути”0; зношення шин в такій підвісці має місце (свічна підвіска)-зменшити хід підвіски;” ефект…на візку.”..не може бути аналогом. там інша схема; Мал. 2-поперечну тягу скоротити і розмістити на шарнірах продольних тяг. щоб забезпечити різний кут повороту коліс. які рухаються по різним траєкторіям (має місце зношення шин); інші зауваження подам з графікою. PS-пропоную на сайті викласти Новорічний календар; перепрошую. якщо я порушив правила коментара.
“Але: плече обкатки має бути”0″” – невірно. Не буду з вами сперечатись, просто зроблю так, як вважаю за потрібне. Ваш варіант я вже випробував. Кастер присутній у всіх автомобільних схемах, мабуть не просто так. Ось тут опис: http://forum.hpv.com.ua/viewtopic.php?f=5&t=26&start=50
“Мал. 2-поперечну тягу скоротити і розмістити на шарнірах продольних тяг. щоб забезпечити різний кут повороту коліс. які рухаються по різним траєкторіям (має місце зношення шин)”
Також невірно. Тому що в даній схемі як раз реалізовано проходження коліс про різних траекторіях в повороті. Просто справа в тому, що лінію сходу необхідно провести не від центру поворотного шарніру через шарнір тяги, а від центру плями контакту КОЛЕСА З ЗЕМЛЕЮ через центр шарніру. А саме це і реалізовано в даній схемі. Ось відео: https://www.youtube.com/watch?v=WvwjsR9z6UA
А ось схема: http://hpv.com.ua/wp-content/uploads/2014/11/akkerman.png
А стосовно календарів, то не маю їх електронної версії. Звертайтеась до Халікова.
А ось схема: http://hpv.com.ua/wp-content/uploads/2014/11/akkerman.png
У меня наилучший результат по Аккерману дал такой способ: на высотеоси передних колес я делал плоскость, на ней отмечал точки пересечения осей шкворней, отмечат средную точку заднего колеса и тогда строил треугольник Аккермана. Способ построения треугольника по точкам контакта колес с землей не дал хорошего результата.
При жеской поперечной рулевой тяге, при работаюшей подвеске твоей конструкции колеса идеально паралельными никогда не будут.
Я пробовал делать пересечения по средней точке заднего колеса – получалось не то, что надо. Потом в описаниях нашёл значения 1\3 и 1\4 от базы. При моделировании наилучший результат был при 1\4 от базы, но никак не на оси заднего колеса.
Но, в твоём случае, возможно как раз, если построить треугольник от точек контакта, от он и выйдет на 1\4 базы.
“При жеской поперечной рулевой тяге, при работаюшей подвеске твоей конструкции колеса идеально параллельными никогда не будут.”
Ну значит, такова судьба… 🙂 Но “идеально” ничего не бывает. Вопрос стоит иначе: – будут ли колёса достаточно параллельны? Вот это покажет практика. После переделки переднего моста колея стала изменяться на 1% вместо 2% при максимальном ходе подвески. Если до весны колёса не сотрутся – значит всё в порядке и схема рабочая. А если сотрутся – значит не рабочая.
Да, идеального ничего нет.
Смотря по каким дорогам будешь ездить, если по грунтовкам то скорее всего не заметишь не паралельность и покрышки не сотрутся, а если по асфальту, думаю заметишь.
и про судьбу, не скажу на верняка, но может если поперечную тягу делать из 3-х частей на шарнирах, может быть за счет этого получиться сохранить парелельность колес при работе подвески.
я немного проверил свое предположение и действительно, если поперечную тягу делать их 3-х частей: короткая средняя часть прикрепленная к шарниру и две длинный тяги идущие от нее к колесам, то нежелательный эффект изменения схождения можно снизить аж в 10 раз.
а как сюда вставить картинку?
а, и у тебя на картинке кастер – это не кастер а плечо обкатки, кастер – это угол наклона шкворня в продольной плоскости.
хорошая статья: http://razvalanet.ucoz.com/index/sekret_prodolzhenie3/0-61
Да,всё верно. Это я напутал термины. Интересно, что в Википедии кастором называют продольный угол, а не поперечный…
А картинки нельзя сюда ставить. Лучше на форум: http://forum.hpv.com.ua/viewtopic.php?f=5&t=26&start=60
Суть на счёт трапеции из 3-х частей я понял. Спасибо за идею!
Прошу виправити мої помилки і терміни-ввести “плече обкатки”; по мал.2-не було достатньої графіки ( то може ідея пригодиться); по Новорічному календарю-не треба нас так далеко відправляти. Чому така реакція?
Вибачайте, не хотів вас образити! Просто календарі робив Халіков за свої гроші по результату конкурсу, проведеному на його сайті. Там скрізь реклама. Це по-перше.
По-друге все-таки є авторське право, хоча і неофіційно, але я не хочу викладати скановані версії, щоб потім нариватись на нерпиємності.
По-трете: формат календарів такий, що не влізе в мій сканер. Я навіть не знаю, де це можна просканувати і скільки це коштуватиме. Якщо ви згодні взяти відповідальність і ініціативу на себе – будь ласка, я вам відправлю ці календарі поштою.
Якщо (раптом) Олег Халіков не проти, щоб ми виклали його календарі на нашому сайті, то він не відмовить в тому, щоб прислати оригінали в цифровому форматі.
Також можу запропонувати розробити власний пдібний календар. Але, будь ласка, давайте обговорювати такі питання на форумі. Коментарі під статтями – не найкраще місце для цього.
Доречі про форум: ось модель нової трапеції
“ефект…на візку.”..не може бути аналогом. там інша схема;”
Спеціально для вас, Володимир, ось малюнок де я показав, що ефект на візку якраз може бути аналогом. Просто на візку трейл дорівнює плечу стабілізації. Дивіться малюнок: http://hpv.com.ua/wp-content/uploads/2014/11/5.png
Прошу “ефект…на візку…” вивести із усіх текстів. як не на часі; по експеріменту-не кероване колесо може мати автоколевання від закрутки пружини (а яке було “плече обкатки”); цікаво. як поведе себе це колесо. поставлене в веловилку (краще без одного пера). а вилку- в твою підвіску. змонтовану по велосипедному? Дозволь пока користуватись цією сторінкою. як виключення.PS-мопед “corrado”має автоколевання. коли не керованний на спуску.
Пружина там не може закручуватись, бо вона опирається на упорний підшипник. Автоколивання були, скоріш за все, через мале плече стабілізації (малий кут продольного нахилу).